
Main Idea:
The actuation of soft actuators using air pressure enables effective movements such as force application and actuator length variation. These actuation motions, when integrated with other automation technologies like sensors and controllers, can serve as efficient substitutes for human massage therapists. Massage therapy is considered one of the effective treatments for physical and mental fatigue caused by modern, machine-driven lifestyles.
The motivation behind this scientific research is to investigate, design, simulate, and test a soft pneumatic actuator aimed at application in massage therapy, with the goal of achieving improved utility and effectiveness. This study focuses on the structure of a soft actuator with three degrees of freedom, designed as a combination of a silicone cylinder and a surrounding spring. The actuator is step-by-step designed in SolidWorks, simulated in Abaqus, and subsequently fabricated and evaluated.
Key advantages of the final fabricated prototype compared to others include the ability to exert over 100 Newtons of force at 3 bar pressure, sufficient angular coverage up to 30 degrees of bending, appropriate stiffness, smaller dimensions, and structural simplicity. These actuator capabilities are well-suited to meet the requirements of two widely-used Swedish massage techniques.
Explanation:
Massage can be defined as the application of rhythmic and systematic pressure and strokes to the soft tissues of the body in order to achieve or maintain health. Across various cultures and throughout the world, different types and styles of massage have emerged. Some of these, such as Thai massage or Shiatsu (originating in Japan), have historical roots and are based on Eastern cultural studies of chakras and energy pathways in the body. Others, such as Swedish or deep tissue massage, are more modern and grounded in medical science and human anatomy.
In this study, Swedish massage is chosen as the basis due to its widespread popularity and high global demand. The main focus of this type of massage is to increase blood flow in the muscles and skin to relieve muscular tension. It also promotes relaxation, improves circulation, and reduces blood pressure. Swedish massage targets the entire body.
The primary challenge addressed in this research is the ability to perform specific massage techniques by applying controlled force and achieving sufficient end-effector angles, based on the pressure variations inside the actuator. Furthermore, changes in actuator shape—such as elongation and stiffness under applied reactive force—are analyzed. This actuator is intended to serve as the end-effector of a massage robot, capable of performing Swedish massage techniques with maximum effectiveness and reproducing the force of a human therapist’s hand as closely as possible.

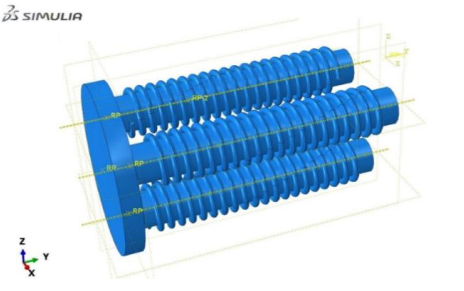
The originality of this research lies in the design of a pneumatic actuator inspired by studies in the soft robotics literature (as cited in the thesis references), aimed at use in a massage robot. For better control and full rotational capability, the proposed end-effector consists of three identical silicone cylinders placed equidistantly around a central axis, allowing rotation in all directions.
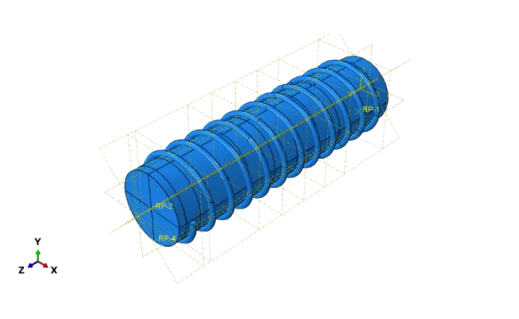
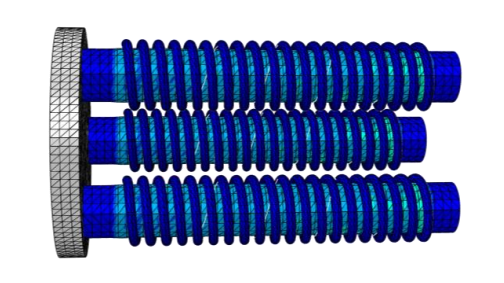
Initial experiments are carried out to evaluate and validate the simulation and modeling of a single-cylinder silicone actuator. Based on the results, a three-cylinder actuator is then designed, simulated, and fabricated. Before constructing the single-cylinder actuator, each component is individually designed, analyzed, and simulated.
Following the design of the silicone cylinder, material definition, segmentation, and meshing were performed. Then, end caps and fixtures were simulated with appropriate constraints. The final massage end-effector is constructed and assembled step by step as designed in previous chapters. At each stage, experiments are conducted to evaluate and verify the simulation results.
Based on the design and analysis predictions, prototypes were evaluated step by step and achieved an accuracy of over 85%. The ability to design, simulate, and fabricate such actuators was successfully demonstrated in this study.

The key achievements of this research can be summarized as follows:
- Output Force: The final actuator can apply an output force of approximately 100 Newtons at an internal pressure of 3 bar. This force is sufficient for massage applications. Given the appropriate slope of the force-pressure curve, only a 3-bar pressure differential is required. The required force range for the effleurage technique is 20–60 N, and for the petrissage technique is 40–100 N—both of which are fully supported.
- Design Dimensions: In the proposed design, the outer diameter of the silicone tubes is 2 cm, and the distance from each tube center to the central axis is 3 cm. In contrast, previous designs that achieved only 40 N force used silicone actuators with an outer diameter of 5 cm and a center-to-center distance of 6 cm.
- Bending Angle: Experimental results from Chapter 5 show that the fabricated end-effector can bend in multiple directions up to the desired 30° angle required for Swedish massage techniques. In the petrissage technique, which requires multi-directional muscle manipulation, the necessary bending angle of 20–30° is successfully achieved.
- Appropriate Stiffness: Tests on angular deflection under tangential forces indicate suitable bending stiffness of the springs surrounding the actuators. As a result, the final actuator maintains its position under external reaction forces and does not easily deviate from its intended path when applying force to the body.
This research successfully presents a high-performance, compact, and efficient pneumatic actuator suitable for use in robotic Swedish massage applications.