
Main Idea:
This research focuses on the design and development of a robotic system for mapping underground environments using compact hardware and optimized algorithms. The primary goal is to create a system capable of accurately generating 3D maps of underground spaces such as pipelines and infrastructure facilities. This approach not only enhances monitoring and inspection processes but also helps reduce the costs and time associated with infrastructure assessments.
By leveraging advanced technologies such as cameras, laser sensors, image processing algorithms, and machine learning techniques, the system can accurately detect structural defects and anomalies. It is suitable for use in various industries, including mining, underground construction, and pipeline inspection, improving the precision and efficiency of underground resource management.
The innovation of this research lies in the design of a lightweight and portable system, combined with the use of optimized data processing algorithms, enabling easy and effective deployment in diverse environments.
Explanation:
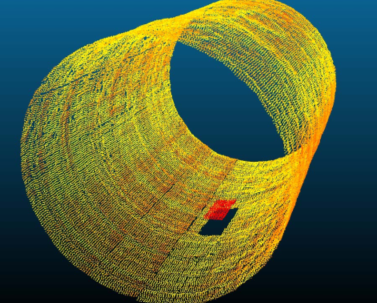
For this research, a robot equipped with appropriate sensors is used. One of these sensors is a laser sensor or LiDAR, which is responsible for collecting spatial coordinate data. After gathering the laser and other necessary data, the sensor sends this information as a package to the central system. The laser data is then processed using various algorithms known as 3D reconstruction techniques.
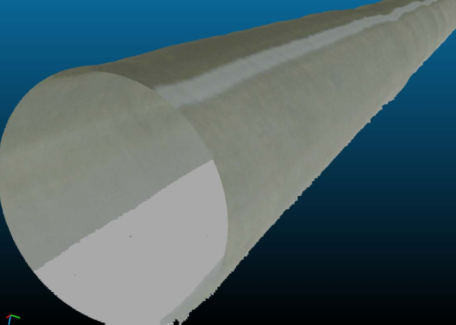
One such method is Poisson 3D Reconstruction, a technique for reconstructing 3D surfaces from point clouds. This method creates a scalar function by solving the Poisson equation, where the gradient of the function matches the normals of the point cloud. The main steps are as follows:
Mesh Refinement:
The resulting mesh can be improved through techniques like smoothing.
Point Cloud Acquisition:
Point clouds are collected using 3D scanners or depth sensors.
Normal Estimation:
If the point cloud does not contain normals, they are estimated using methods like Principal Component Analysis (PCA).
Poisson Equation Formulation:
The Poisson equation is defined as:
∇²ϕ = ∇⋅n
where ϕ is the scalar function and n is the normal field.
Discretization and Solving the Equation:
The equation is discretized over a 3D grid and solved using numerical methods such as the Conjugate Gradient method.
Surface Extraction:
Using the Marching Cubes algorithm, the surface is extracted from the scalar function.
This process enables the accurate reconstruction of 3D surfaces from LiDAR data, contributing to the effectiveness of the robotic mapping system.
